Solución de sistema de visión 3D: Aplicación de manipulación automática de poleas
La Robótica Guiada por Visión (Vision Guided Robotics VGR) es una necesidad existente en la industria que permite la utilización de los robots en entornos flexibles y cambiantes. Una parte importante de las soluciones VGR es el Picking 3D, que consiste en la extracción de piezas amontonadas aleatoriamente en un espacio (contenedor, cinta ) utilizando un sistema de visión 3D para la localización y un sistema robótico para la extracción y su posterior reubicación.
Junto con la ingeniería Conecta2 Automotion, INFAIMON ha participado en el exitoso desarrollo de una aplicación de Picking 3D de aros de caucho totalmente desordenados sobre una cinta.
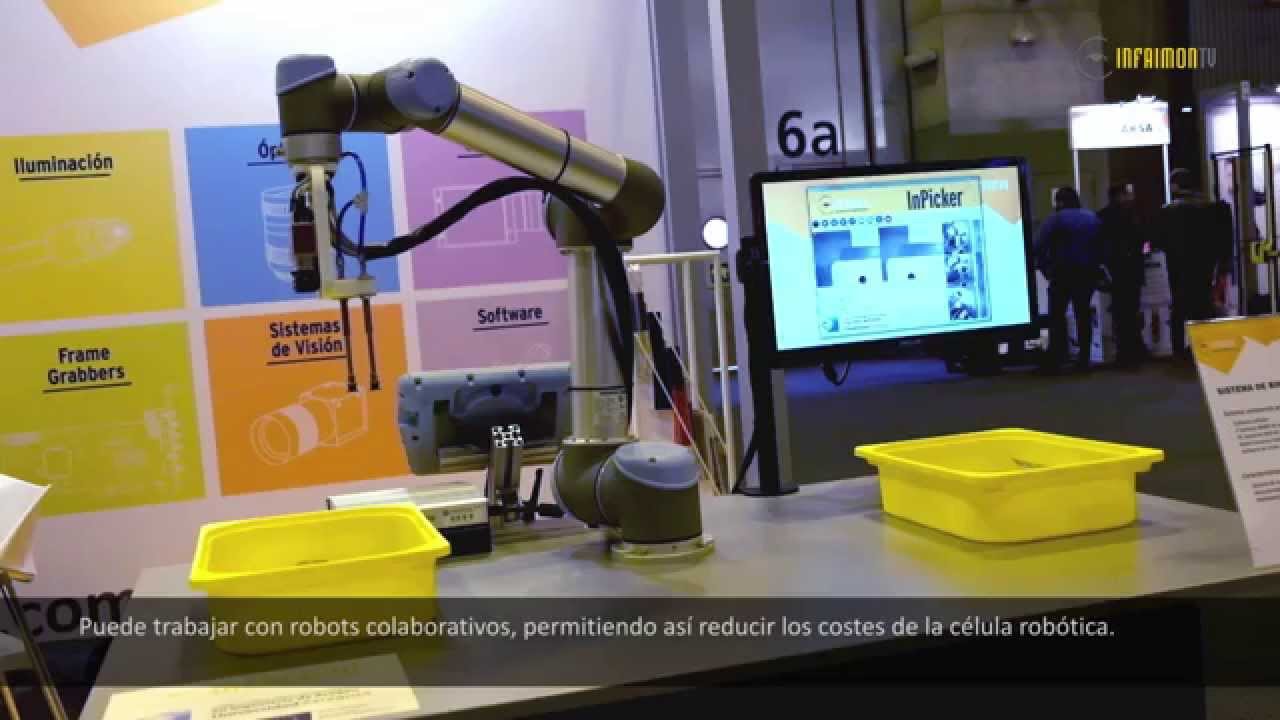
En la solución planteada se ha utilizado la herramienta software InPicker. Dicha herramienta está basada en un sistema de análisis de imagen 3D que permite reconocer y determinar la posición de objetos amontonados sobre una cinta, utilizando para ello la técnica de adquisición de proyección de patrones mediante cámara color (ZIVID).
La solución permite en tiempo real realizar la extracción de los aros de caucho, teniendo en cuenta el cálculo de las posibles colisiones del robot durante el agarre.
Obtenga más información de nuestra solución de sistema de visión 3D Bin Picking: www.inpicker.com
En el siguiente vídeo puede ver la aplicación en entorno real:
https://www.youtube.com/watch?v=vAjiARkuoGM&feature=youtu.be
Infaimon, S.L.
Plaza Europa, 10 Planta 1
08902 - L'Hospitalet de Llobregat (España)
Web: www.es.stemmer-imaging.com/